西门子S120电机驱动模块6SL3120-1TE21-8AD0
更新:2023-10-26 04:00 编号:20931468 发布IP:116.224.103.5 浏览:3次






- 发布企业
- 浔之漫智控技术(上海)有限公司商铺
- 认证
- 资质核验:已通过营业执照认证入驻顺企:第3年主体名称:浔之漫智控技术(上海)有限公司组织机构代码:91310117MA1J3R698D
- 报价
- 请来电询价
- 品牌
- 西门子
- 型号
- 模块
- 产地
- 德国
- 关键词
- PLC,CPU,触摸屏,变频器,交换机,电机,电线,电缆,低压,
- 所在地
- 上海市松江区广富林路4855弄88号3楼
- 联系电话
- 15821971992
- 全国服务热线
- 15821971992
- 经理
- 聂聪 请说明来自顺企网,优惠更多

详细介绍
| TEMP(临时变量)为暂时保存在局部数据区中的变量。只有在执行该POU时,定义的临时变量才被使用,POU执行完后,不再使用临时变量的数值。在主程序或中断程序中,局部变量表只包含TEMP变量。子程序的局部变量表中还有三种变量:IN(输入变量)、OUT(输出变量)、IN_OUT(输入/输出变量)。 在局部变量表中赋值时,只需指定声明局部变量的类型(TEMP、IN、IN_OUT或OUT)和数据类型(参见SIMATIC和IEC1131-3的数据类型),但不指定存储器地址,程序编辑器自动地在L存储区中为所有局部变量指定存储器位置。起始地址为LO,每字节8位,能访问到位。字节、字和双字在局部存储器中按字节顺序分配,例如LBx、LWx或LDx。 局部变量作为参数向子程序传递时,在该子程序的局部变量表中指定的数据类型必须与调用POU中的数据类型值匹配。例如,在主程序OB1中调用子程序SBR0,使用名为INPUT1的全局符号作为子程序的输入参数。在SBR0的局部变量表中,已经定义了一个名为FIRST的局部变量作为该输入参数。当OB1调用SBRO时,INPUT1的数值被传入FIRST,INPUT1和FIRST的数据类型必须匹配。在程序中使用符号名时,程序编辑器检查有关POU的局部变量表,检查符号表/全局变量表。如果某符号名在两处都没有定义,程序编辑器则将其视为全局符号,程序编辑器指定一条绿色波浪状下划线,并将名称括在双引号中,例如“UndefinedLocalVar”(未定义的局部变量)。如果后来对该符号名赋了值,则程序编辑器不会自动读取局部变量表并修改它。为了将该符号名作为局部变量使用,必须手工删除程序代码中的引号,并在符号名前插入#号,例如改为#UndefinedLocalVar。 各子程序*多可调用16个输入/输出参数,如果超出16个,将返回错误。选择希望的变量类型所在的行,并在名称域中键入变量名称,在数据类型域中键入数据类型。不需在局部变量表中的变量名称前加#号,#号只在程序代码中的局部变量名之前使用。 局部变量名可包含数字、字母和下划线(_),也可以包含扩展字符(ASCII128~255)。第一个字符必须是字母或扩展字符,关键字不能作为符号名。 局部变量表中的变量名被下载和存储在CPU存储器中,使用较长的变量名将占用较多的存储空间。 |
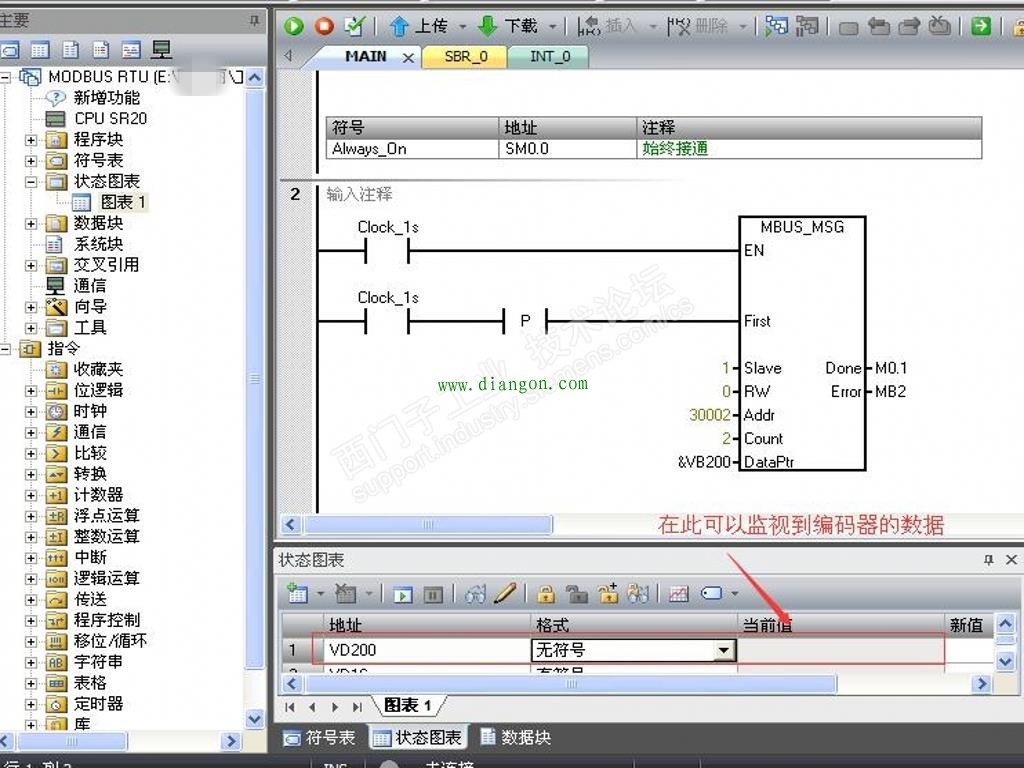
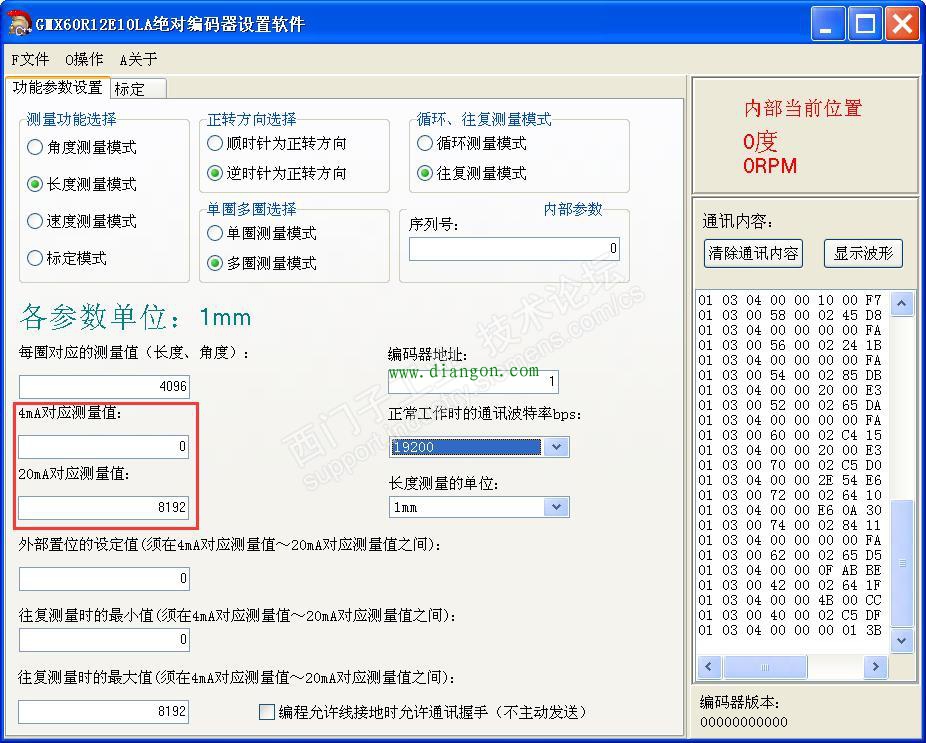
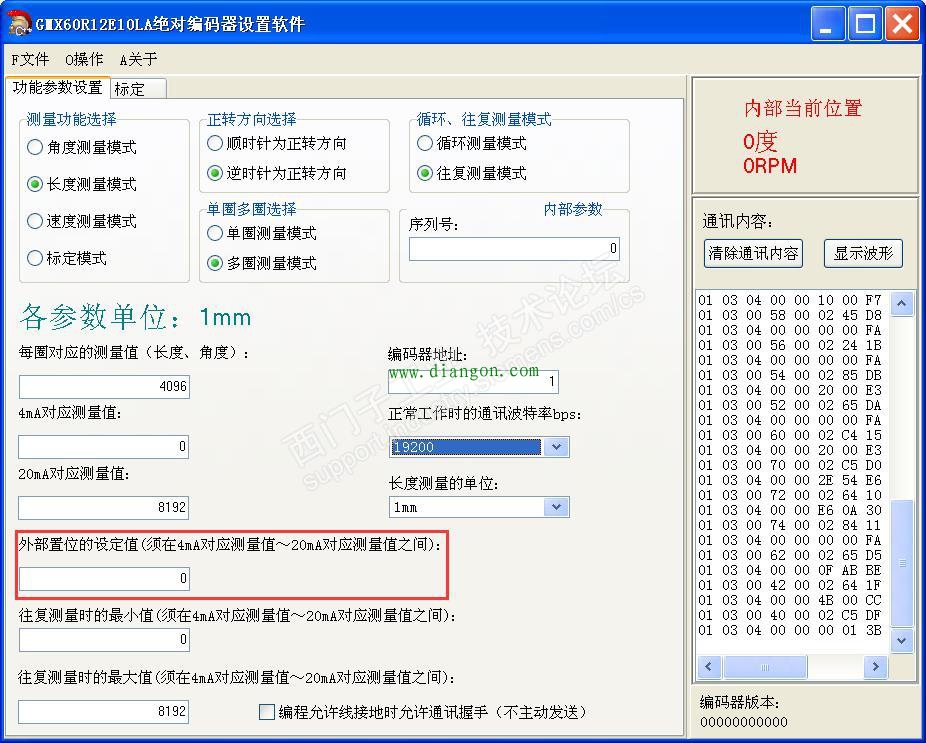
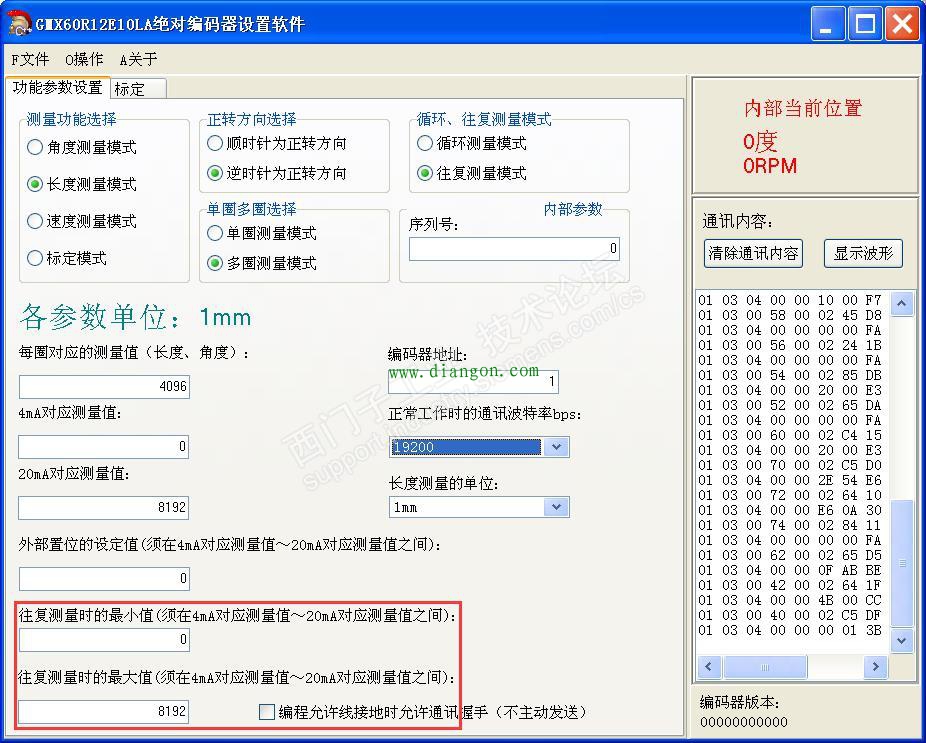
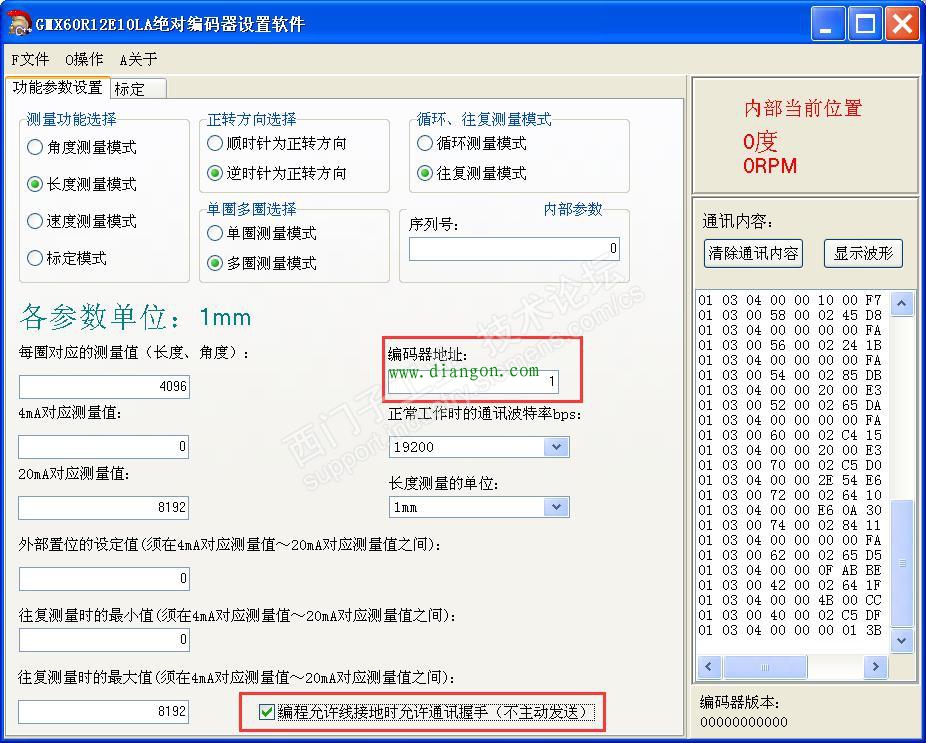
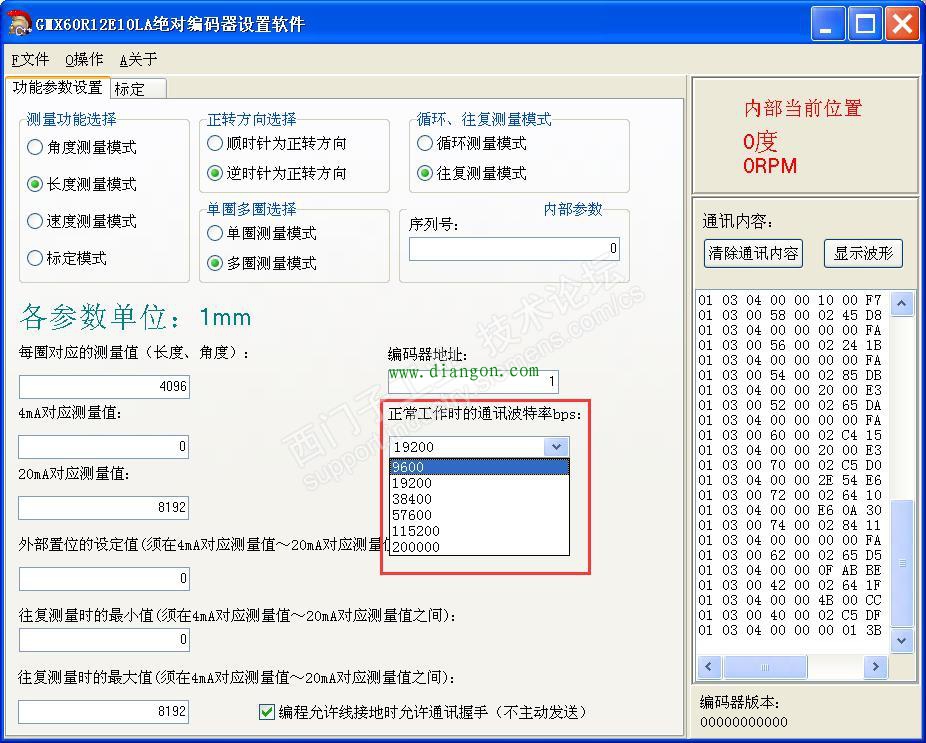
| 硬件准备 1、西门子plc(smart200) 2、**值编码器 3、装有STEP7-MicroWIN SMART软件的电脑 4、网线
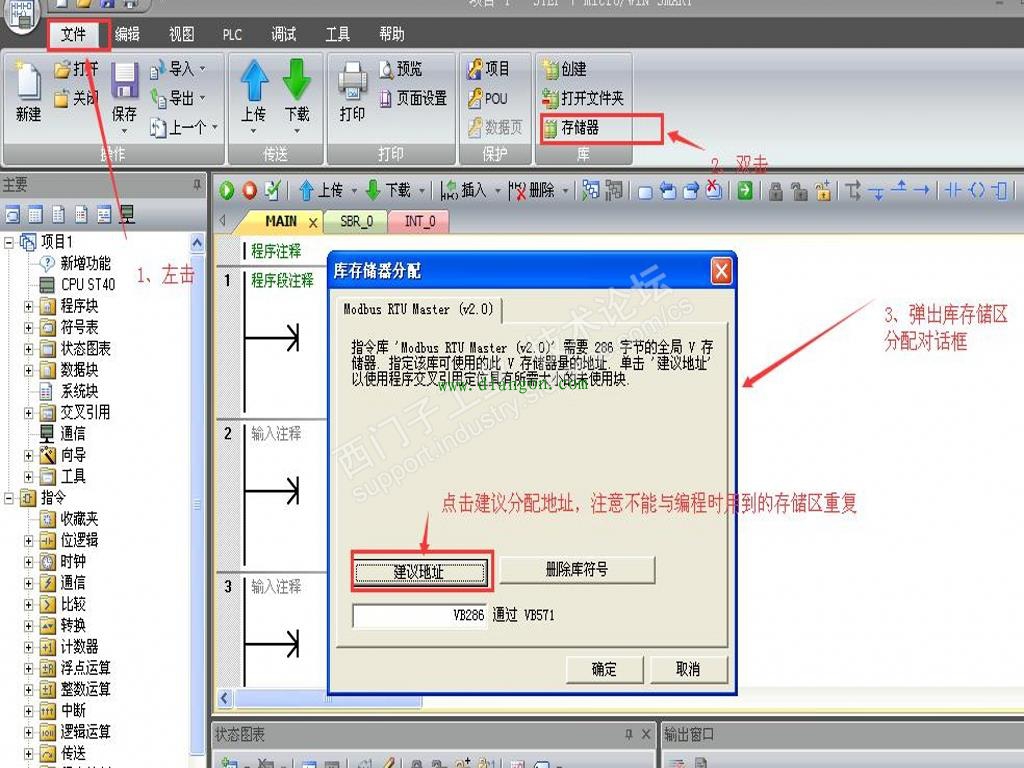
4、给MODBUS指令分配库寄存器
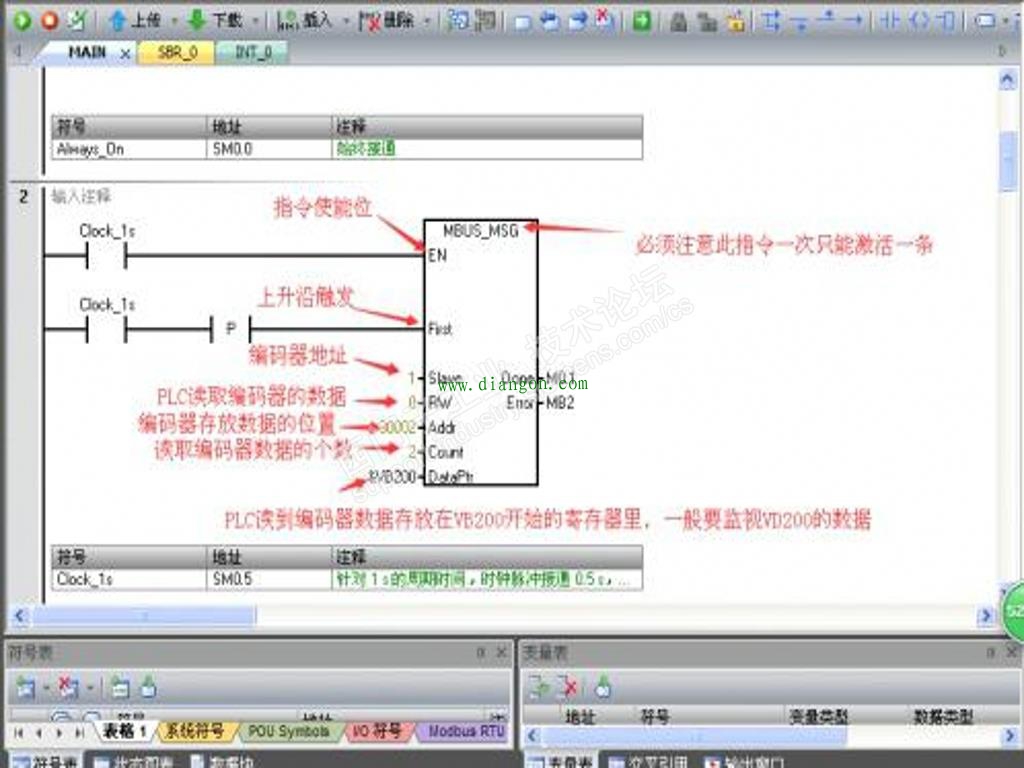
5、编译、下载,可以在状态图表里监控VD200数据
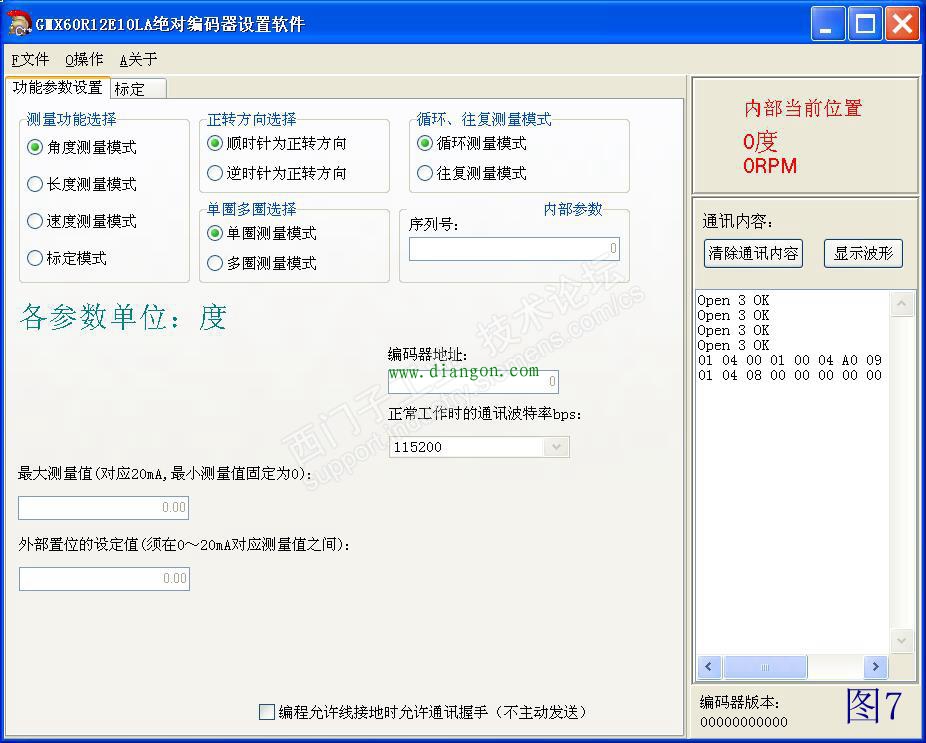
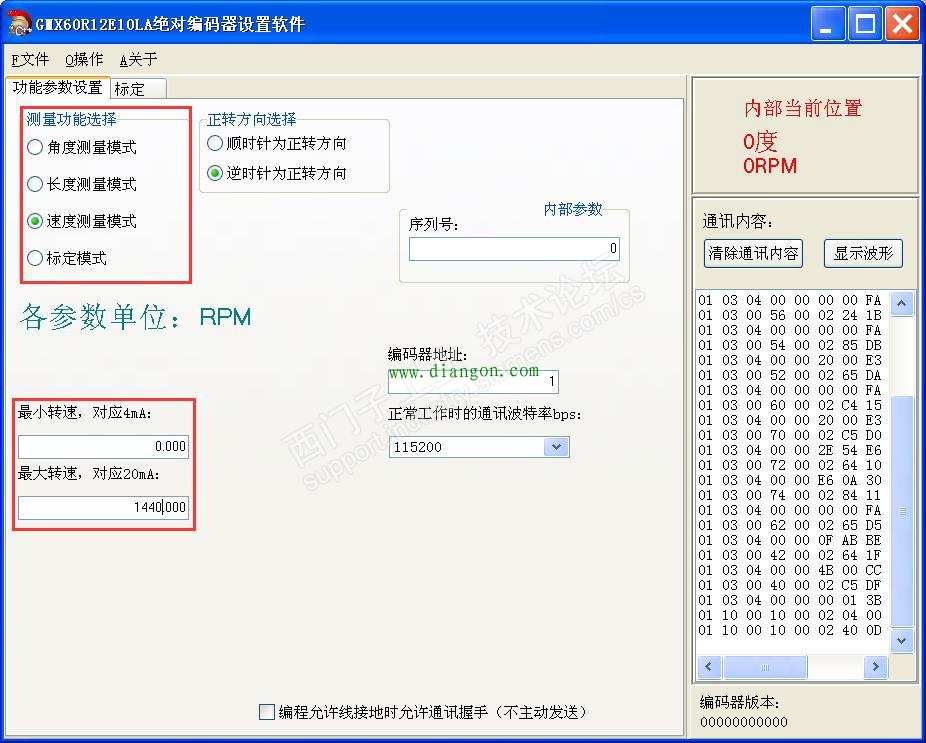
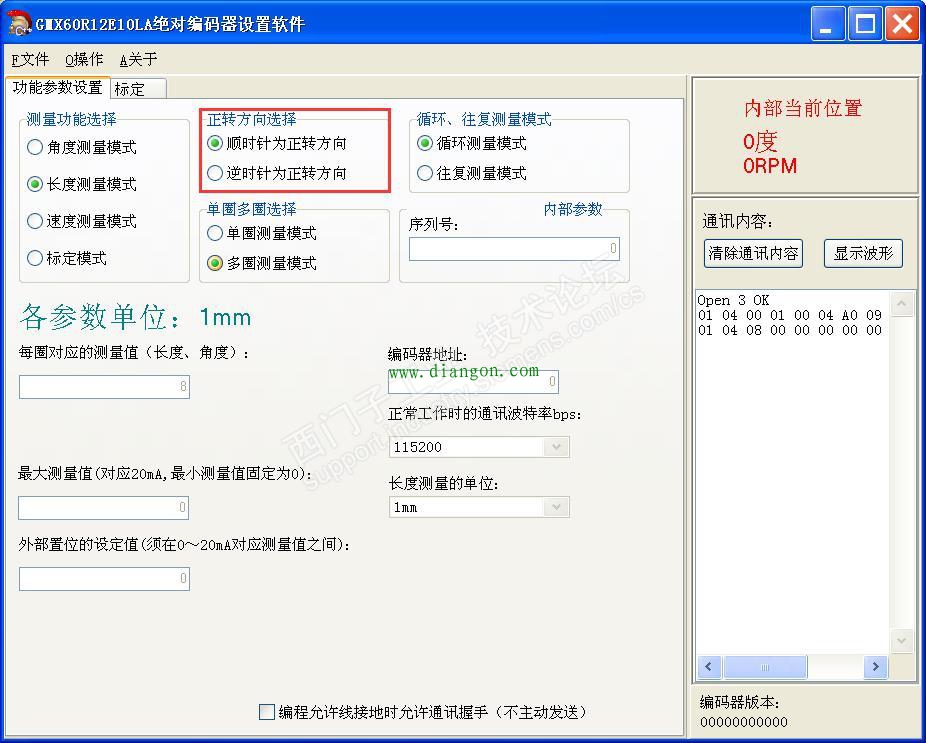
注:这里的编码器值是长度值还是角度值需要可以通过easyPro软件来设定
|



| 成立日期 | 2019年09月10日 | ||
| 法定代表人 | 袁宜男 | ||
| 注册资本 | 5000000 | ||
| 主营产品 | 西门子PLC模块、CPU模块、DP通讯电缆、6GK交换机、低压电器授权总代理商、代理商中国授权一级总代理商 | ||
| 经营范围 | 从事智能科技、自动化科技、机电领域内的技术开发、技术转让、技术咨询、技术服务,工业自动化设备安装,工业自动化控制设备、电气设备、机电设备、电子产品、五金产品、金属材料、仪器仪表、橡塑制品销售,商务信息咨询,软件开发,建筑装修装饰建设工程专业施工,建筑安装工程(除特种设备),机械设备租赁(不得从事金融租赁),物业管理。工业自动化设备加工、销售。【依法须经批准的项目,经相关部门批准后方可开展经营活动】 | ||
| 公司简介 | 浔之漫智控技术(上海)有限公司是中国西门子的合作伙伴,公司主要从事工业自动化产品的集成,销售和维修,是全国知名的自动化设备公司之一。公司坐落于中国一线城市上海市,我们真诚的希望在器件的销售和工程项目承接、系统开发上能和贵司开展多方面合作。以下是我司主要代理西门子产品,欢迎您来电来函咨询,我们将为您提供优惠的价格及快捷细致的服务!西门子华东区域代理SIEMENS可编程控制器1、SIMATICS7系列 ... | ||
- 西门子6ES7231-0HF22-0XA0详细使用3UG4621/3UG4622监控继电器3UG4621或3UG4622电流监控继... 2023-10-26
- 西门子6ES7231-0HC22-0XA8详细使用SIRIUS3UG4622监控继电器继电器监控单相AC电流(rms值)和DC电流... 2023-10-26
- 西门子6ES7223-1PM22-0XA8详细使用1、刀具的选择应满足:安装调整方便、刚性好、精度高、耐用度高等要求。1)刀具主要... 2023-10-26
- 西门子6ES7223-1BM22-0XA8详细使用根据被加工零件图纸,按照已经确定的加工路线和允许的编程误差,计算数控编程所需要的... 2023-10-26
- 西门子6ES7223-1PL22-0XA8详细使用1)G00、G01、G02、G03快速点定位G00X(U)_Z(W)_;直线插补... 2023-10-26
 西门子S120电机驱动模块6SL3120-1TE21-8AA4品牌:西门子
西门子S120电机驱动模块6SL3120-1TE21-8AA4品牌:西门子 西门子S120电机驱动模块6SL3120-1TE21-0AD0品牌:西门子
西门子S120电机驱动模块6SL3120-1TE21-0AD0品牌:西门子 西门子S120电机驱动模块6SL3120-1TE21-0AA4品牌:西门子
西门子S120电机驱动模块6SL3120-1TE21-0AA4品牌:西门子 西门子S120电机驱动模块6SL3120-1TE15-0AD0品牌:西门子
西门子S120电机驱动模块6SL3120-1TE15-0AD0品牌:西门子 西门子S120电机驱动模块6SL3120-1TE15-0AA4品牌:西门子
西门子S120电机驱动模块6SL3120-1TE15-0AA4品牌:西门子 西门子S120电机驱动模块6SL3120-1TE21-8AC0品牌:西门子
西门子S120电机驱动模块6SL3120-1TE21-8AC0品牌:西门子 西门子S120电机驱动模块6SL3120-1TE23-0AA4品牌:西门子
西门子S120电机驱动模块6SL3120-1TE23-0AA4品牌:西门子 西门子S120电机驱动模块6SL3120-1TE23-0AD0品牌:西门子
西门子S120电机驱动模块6SL3120-1TE23-0AD0品牌:西门子- 西门子S120电机驱动模块6SL3120-1TE24-5AA3品牌:西门子
 西门子S120电机驱动模块6SL3120-1TE26-0AA3品牌:西门子
西门子S120电机驱动模块6SL3120-1TE26-0AA3品牌:西门子








